
Yapay His Sistemleri
Kumandalarda gerekli güç gradyanının sağlayarak aşırı G yüklerini engellememiz gerekir.Bunun için iki tip sistem kullanılır. Birincil sistemlerde yaylar ve ağırlıklar kullanılır. Kumandaların güç gradyanı JAR 23 ve JAR 25 ‘e göre ayarlanır.Olması gereken kumanda güç gradyanlarının tablosu şu şekildedir:

Yapay His Sistemlerini kısaca inceleyelim:
1) Birinci yöntemde iki yönlü bir yay sistemi kumandalara eklenerek verilen kumandanın aksine kuvvet uygulayacaktır. Bu yöntemde daha derin kumandalar vermemiz gereken düşük hızlarda etkisi çok fazladır. Daha küçük kumandalar verdiğimiz yüksek hızlarda ise daha az etkilidir.

2)İkincisi yöntemde iritifa dümenin park pozisyonunda olduğu gibi sürekli alçalış pozisyonunda olmasını engelleyen aşağı yönlü tek yönlü yay sistemidir. Fakat yine hızdan bağımsız bir sistem olduğu için manevra kabiliyetini azaltır.
3) Üçüncü yöntem ise Bob Weight olarak adlandırılır. Bu yöntemde irtifa dümenini dengede tutacak kadar bir ağırlık kumandaya eklenmiştir. Bu yöntemde ikincisi gibi olsa da kumanda güç gradyanı süratten etkilenecek şekilde tasarlanmıştır.

Kumandalarla direk temasımızın olmadığı uçaklarda (PCU -Power Control Unit kullanılan uçaklarda ) kumandaların menteşe momenti olmadığı için kolayca kumanda verilebilir. Fakat bu durumda kumandalardan geri bildirim alamadığımız için ani ve büyük kumanda verme riskimiz oluşur. Bunu yenmek için bize kumandalardaki bu geri bildirimi sağlayacak yapay his sistemlerine ihtiyaç duyarız.Bu yapay his sistemleri ile kumandalarımız belirli güç aralıklarına ayarlanır. Bu sistemleri bir göz atalım:
1)Yaylı his siteminde normal yaylı sistemde bulundan yay bir silindir içinde hareket eder ve PCU birimine bu ölçüde bir kumanda hareketi iletilir.

2) Temel Q His sisteminde ise işte bizim kumandalara direk temasımız olduğu durumdaki gibi kumanda sertliği hıza göre belirlenebilir. Böylece bu eksiklik giderilerek her durumda uygun kumanda hareket sahası sağlanır. Düşük süratlerde daha az karşı kuvvet ve daha geniş hareket sahası varken yüksek süratlerde daha sert kumandalar ve daha az hareket sahası sağlanır. Peki bu nasıl mümkün oluyor?
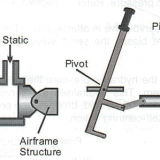
Cevap sürat saatimizin çalışma mantığında saklıdır. Sistem silindir içindeki hareketli bir pistonun bir yanından pitot basıncı diğer taraftan ise statik basınç sağlanmasıyla çalışır. Sonuç aradaki fark yani dinamik basınçtır. Toplam basınçtan , statik basınç çıkarılarak dinamik basınç bulunur. Yüksek hız, yüksek dinamik basınç anlamına gelir ve böylece daha yüksek kumanda kuvvet gradyanı sağlanır.

3) Hidrolik Q hissinde ise aynı mantık esasına göre çalışır fakat bu kez pitot basıncı ile statik basınç hidrolik dolu bir kaba uygulanır. Böylece daha hassas bir sistem oluşur. Kabın içindeki hidrolik basıncı dinamik basınç oranında basınçlanır ve yapay his daha hassas elde edilir.

Uçağımızda bize emniyet sağlayan pek çok sistemin olduğunu(Mesela biri :Yapay His Sistemleri) ve nasıl çalıştığını da bildiğimiz Emniyetli uçuşlar …











{kind=link}